Sensors¶
Sensors measurements are the inputs of the mex block (embedded code).
To perform a correct simulation, the user has to configure the inputs with the same scheme as Veronte Autopilot 1x reads them. Each sensor has a certain vector/array which usually includes raw data in one or more coordinates, sensor temperatures, variances or squared errors.
Warning
Users cannot set constant values for these variables as this may be interpreted by Veronte Autopilot 1x as sensor failure.
For this reason, if the simulated signal is constant, it is recommended to add some white noise to it.
This section aims to ilustrate how to implement the inputs described in the previous section. The structures shown here are indicative and can of course be adapted by the user:
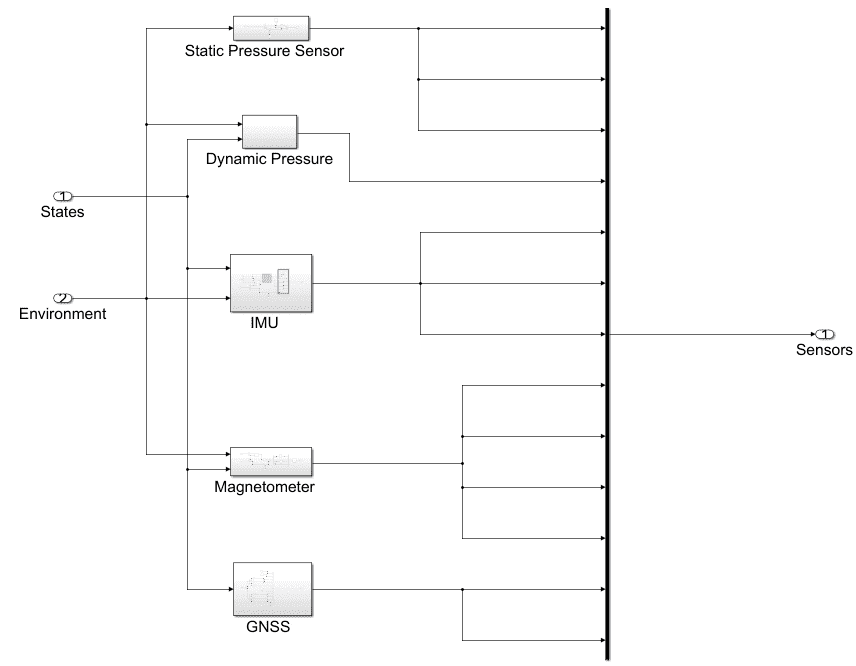
Sensors inputs¶
Next, the user will find some examples of how to implement the following sensors: